
 |
| Rough model sheet [Mistakes : normals are on backwards, changed his name from in-bot, topology is wrong.] |
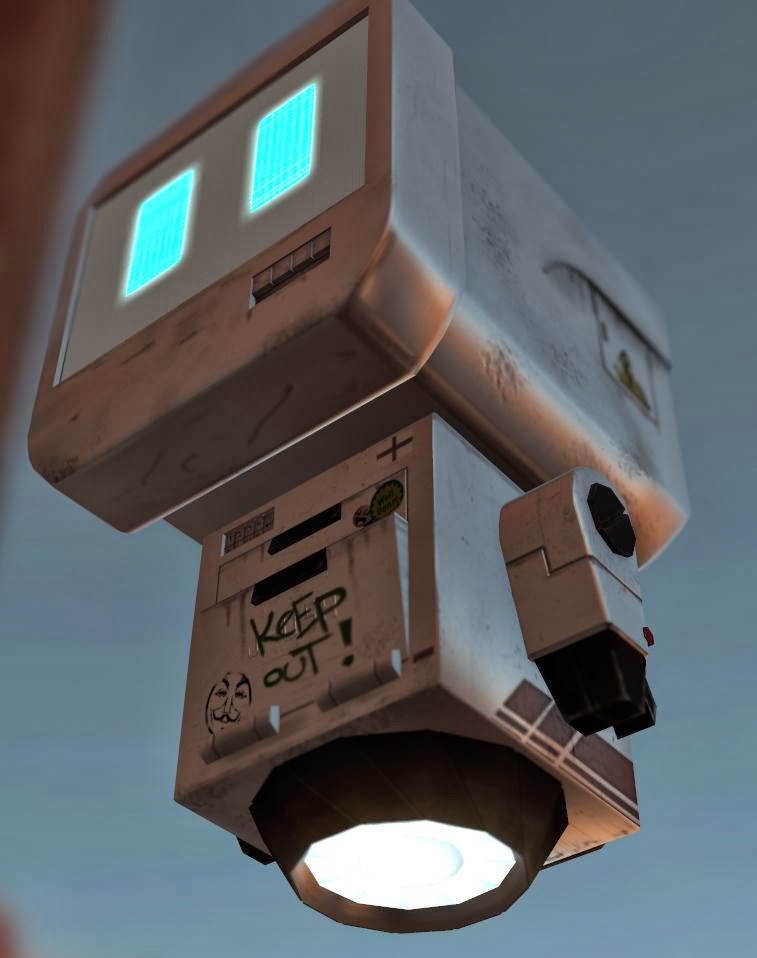
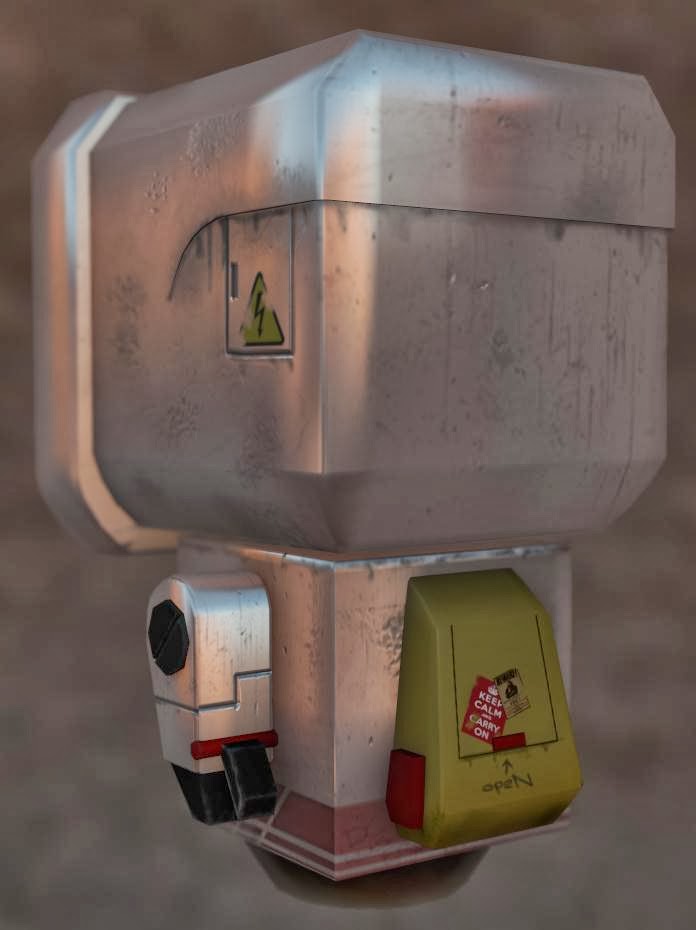
I still have a few fixes to do with this guy, but they aren't really noticeable problems and are quite minor and easy to fix [I hope] such as AO bake problems, neatening the textures and making a gloss map for him.
Note: I changed my robots name from "In-Bot" to "J-05H" as he was meant to be an inventory bot that kids get given to carry their stuff and keep an eye on them...like an interactive haversack lol but, I changed it to "J-05H" as a friend of mine recently went to jail and I won't see him for a while so I named it after him.
Note: I changed my robots name from "In-Bot" to "J-05H" as he was meant to be an inventory bot that kids get given to carry their stuff and keep an eye on them...like an interactive haversack lol but, I changed it to "J-05H" as a friend of mine recently went to jail and I won't see him for a while so I named it after him.
































